Connecting Everything
Let’s prepare our hardware! Start by plugging the Omega2, PWM Expansion, and ADC Expansion into the Expansion Dock
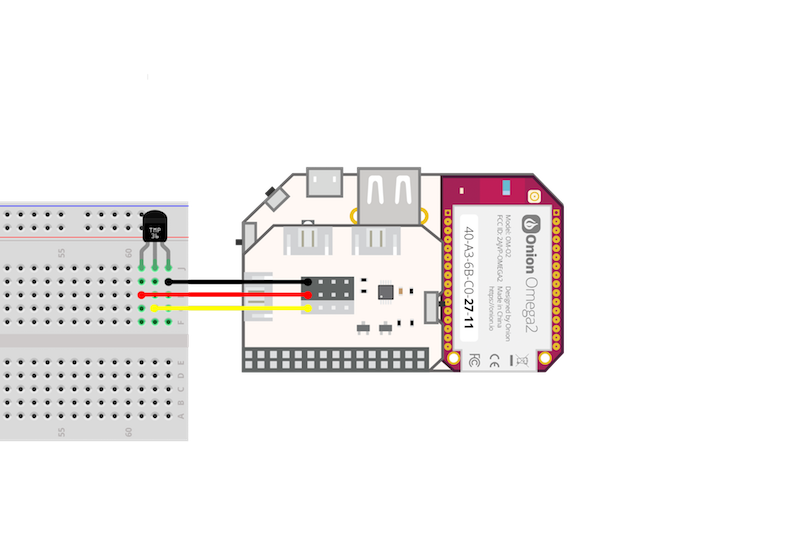
Let’s get the temperature sensor connected first:
- Get the TMP36 sensor flat side facing towards you.
- Connect the Left terminal into the 5V female connector on the ADC
- Connect the Middle terminal, Vout, to the Signal connector on the ADC Expansion
- And finally, the right terminal to GND on the ADC Expansion
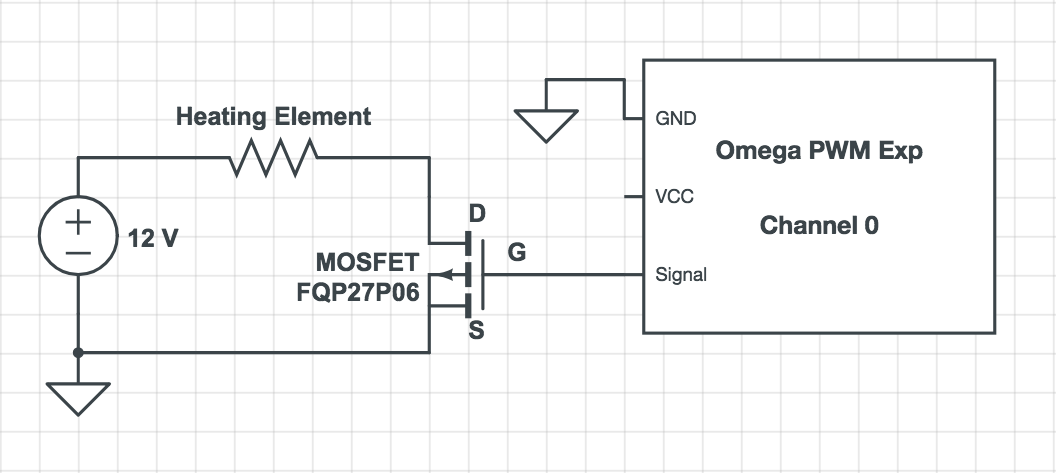
Next, we’ll connect the heating pad to the PWM Expansion through the Power MOSFET. This will allow us to use the PWM signal generated by the Omega PID Controller to adjust how much heat is produced.
Tuning the PID Controller
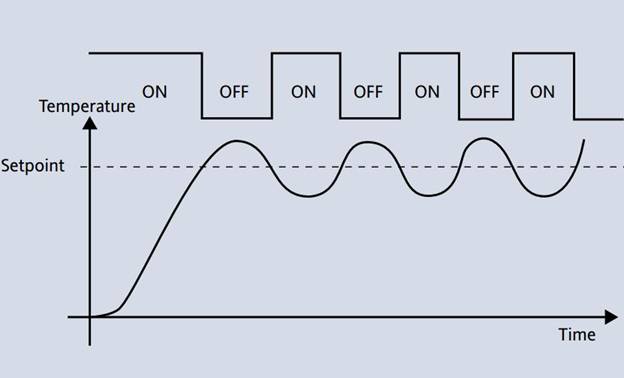
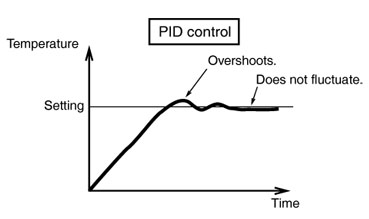
Now we’ll need to tune our PID controller so that it keeps the incubator at as close as possible to a temperature of our choosing at all times, without much fluctuation:
The Python program reads it’s configuration data from a file on the Omega, /tmp/pid.conf. It’s organized as a CSV with the following configuration:
[Measurement Set-Point],[P Gain],[I Gain],[D Gain]
The program will automatically create this file and populate it with default values if it doesn’t exist:
35,10,1,1
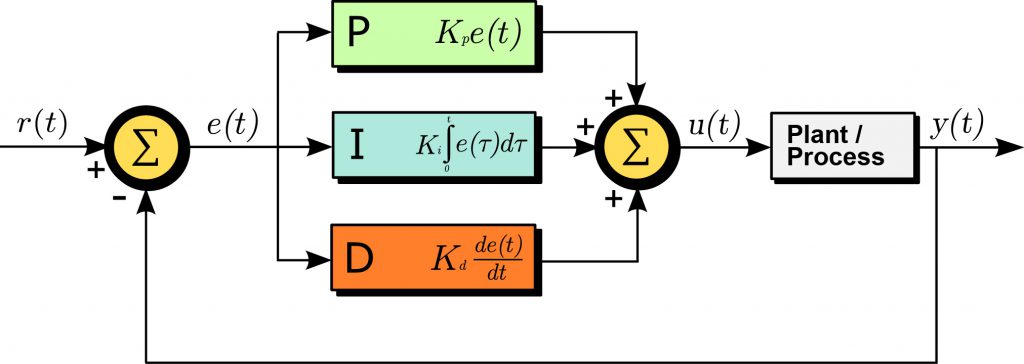
Meaning it defines 35 as the set-point for the PID Controller, and then 10, 1, and 1, for the P, I, and D gain values.
You can update the configuration file on the fly while the program is running and it will pick up the changes!
Ok, now let’s actually tune our controller:
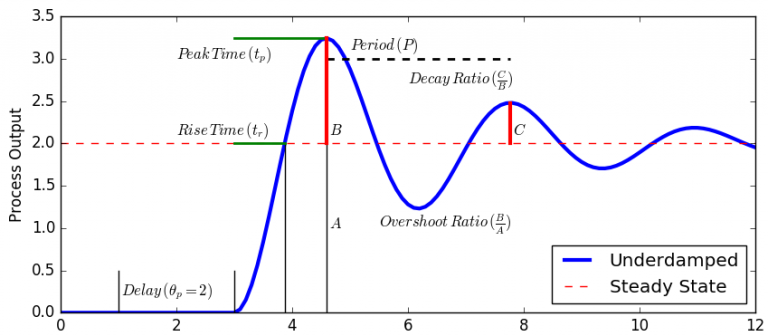
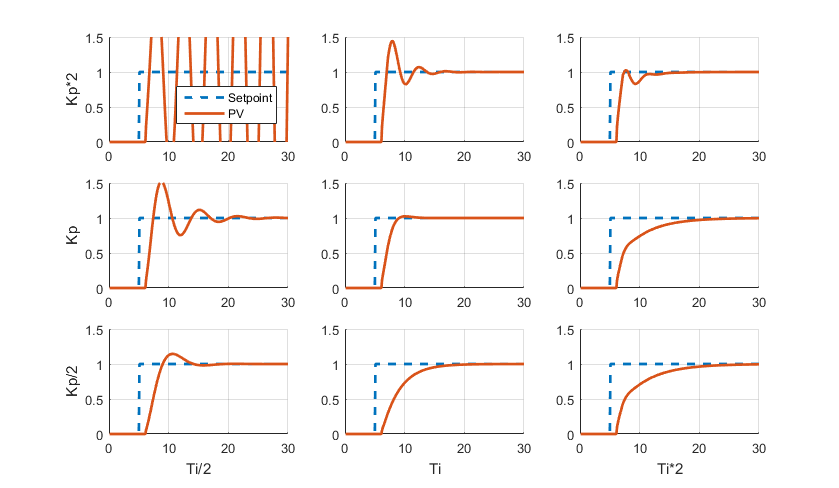
We’ll start by setting all the gains to zero. Next, increase the gain until you reach the point when your temperature starts to oscillate steadily around the set-point. In order to get rid of unnecessary oscillation, we’ll increase the P gain. Keep increasing the numbers and observing the output. Set P and D values to the last digits that did not cause too much oscillation. Now the I value comes into play: increase it until you reach the set-point and the oscillation becomes unnoticeable.
It’s ok if you still see a some oscillation or overshooting, PID tuning is an iterative game. We recommend reading more on the details of how PID works in order to have a better handle on how each gain affects the controller’s output.